RC Sailboat Version 2
Six years ago, I built a wifi-controlled pop bottle sailboat. Smartphone control wasn’t great, so I turned my decommissioned weather station into a remote control.

My re-used weather station project board is a homemade Arduino board, with an APC220 transceiver radio. I added two rotary potentiometers for rudder and sail control. I removed the Raspberry Pi in the boat, and connected another APC220 transceiver to the Arduino Uno that controlled the sail and rudder servos.
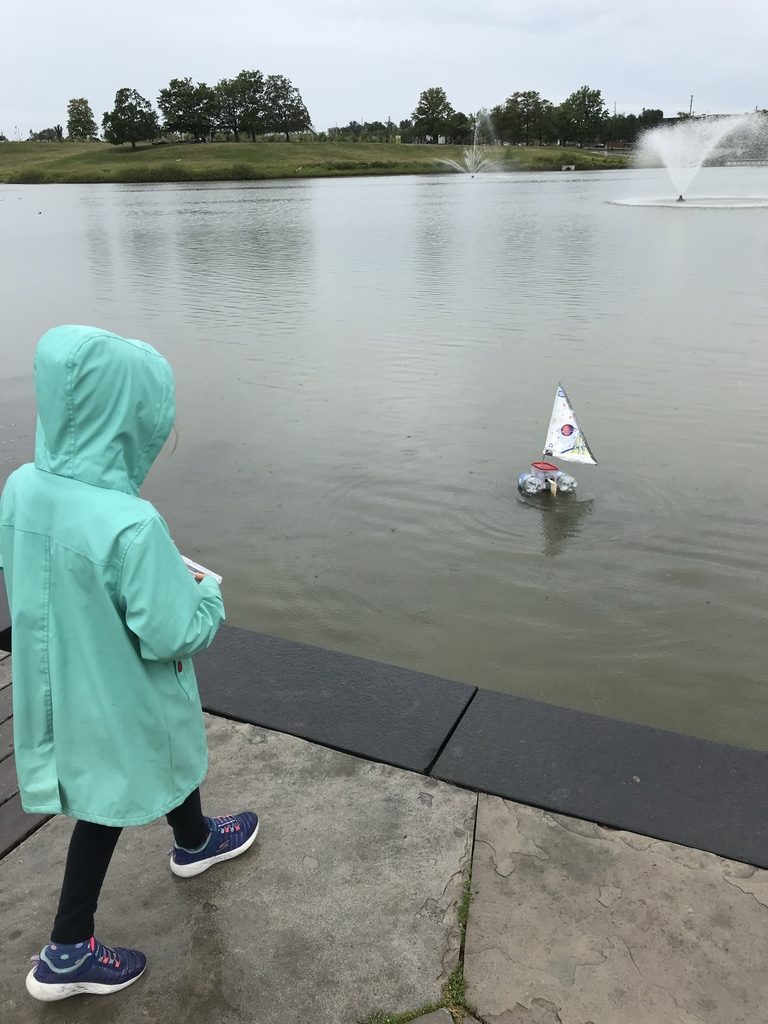
We drove to Downsview Park and launched the boat.
Control still wasn’t great:
- Controlling the sail and the rudder is fine, but with the boat just floating on the pop bottles, the rudder has very little effect. Our boat design itself needs improvement - I think this is currently the greatest issue.
- My transmitter and receiver code could use some optimization - as I was troubleshooting at home, my code limited updates, and was only sampling every second - controls seemed “laggy”.
- I’m using very inexpensive TowerPro MG995 servos, which many advise against using. They were fine for playing around with interfacing, but they are slow, they seem to have a hard time holding their position, as well as not consistently reaching their programmed position.

I did write my phone number on the boat in case the boat got stuck in the middle, and someone else eventually found it. In the end, it wasn’t required. We just played with the controls as the wind carried it to the other side - probably about 100 m.

Maybe some time over the next 6 years, I’ll optimize the RC code, install better servos, and improve the boat design by adding a keel.